happicow.com
happicow.com
ArduVolans

ArduVolans is an autopilot for remote controlled aircraft. At this point it has not seen any flight time. But all of the components work as expected.
Features
- ATMEGA 644P 16 Mhz processor
- 64K of programming space
- 2K of RAM
- Single board design
- 5 channel input from radio
- 4 channel output to servers / ESC
- 3 amp, 5 volt regulator which can optionally power servos
- Battery voltage divider for monitoring battery level
- Mediatek MT3329 GPS soldered on board
- 3 axis gyro (L3G4200)
- 3 axis magnetometer (HMC5883L)
- 3 axis accelerometer (ADXL345)
- Air pressure sensor (BMP085)
- 256kbit EEPROM for logging
- 7 IO pins available for expansion
- 1.75" x 2.5"
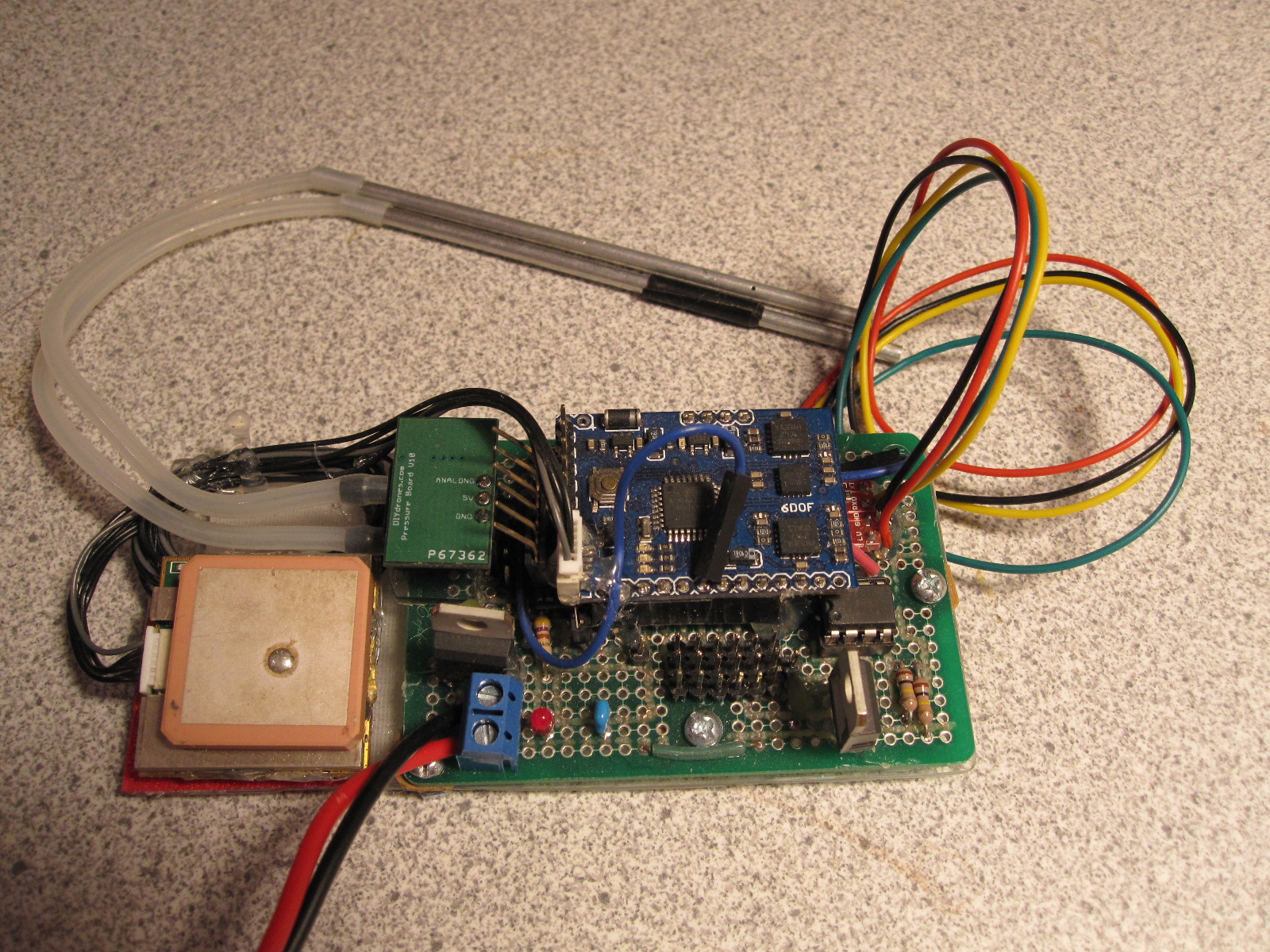
Prototype
This is my originaly prototype. This particular mish-mash of stuff has seen time in the air. It consists of a Sparkfun Arduino Mini board (you can't see it), located under the DIY Drones ArduIMU v2 board, a 506 GPS, DIY Drones airspeed sensor and a Sparkfun breadboard.